驭势云脑 重塑无人驾驶与AGV的云边端协同新范式
随着工业4.0与智能交通时代的加速到来,无人驾驶车辆和自动导引车(AGV)已成为推动产业智能化升级的核心载体。单一车辆的智能存在感知局限、算力瓶颈与协同效率等挑战。『驭势云脑』项目应运而生,它并非简单的云端控制中心,而是一个深度融合云计算、边缘计算与终端设备能力的智能协同系统,旨在构建一个高效、安全、可扩展的“云-边-端”一体化智能生态。
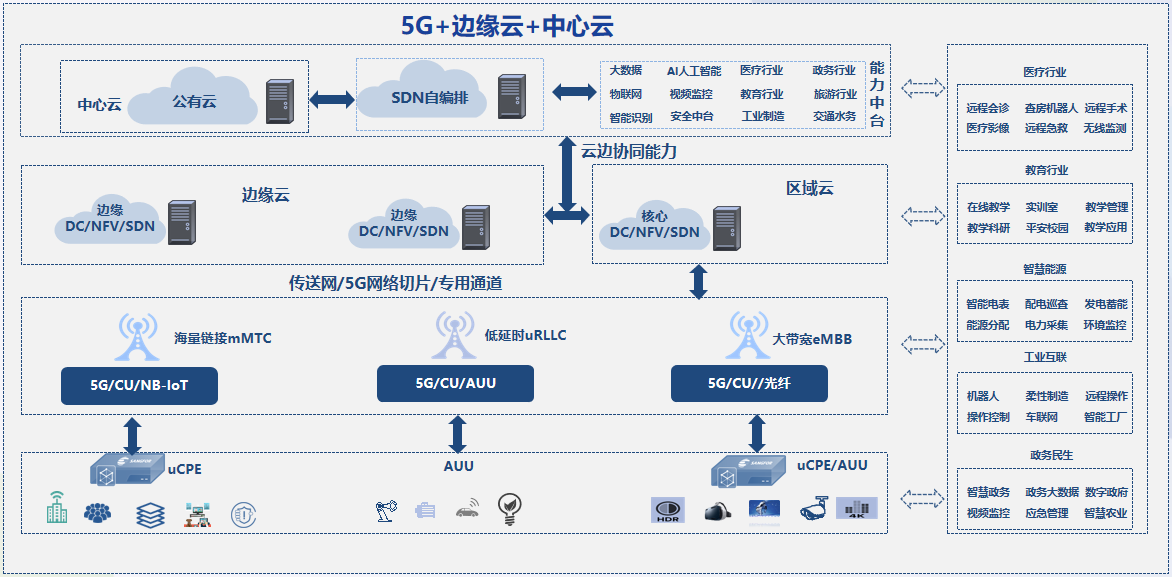
一、 核心架构:三层协同,智慧涌现
“驭势云脑”的核心在于其精巧的层次化协同架构:
- 云端智能大脑(Cloud Brain):作为系统的决策与指挥中枢,云端汇聚全域数据,进行宏观调度、路径全局优化、高精地图实时更新与深度学习模型训练。它拥有近乎无限的存储与计算能力,能够处理复杂交通预测、大规模车队调度等宏观任务。
- 边缘计算节点(Edge Node):部署在园区、工厂、港口等场景的边缘服务器,构成了系统的“区域神经中枢”。它们负责处理本区域内的实时数据(如多车协同避障、局部交通流管理),响应延迟极低,有效分担云端压力,并在网络不稳定时保障关键业务的连续性。
- 终端执行单元(End Device):即每一台无人驾驶车辆或AGV。它们搭载先进的传感器和车载计算单元,负责最底层的环境感知、实时定位和瞬时反应。在“云脑”的指令与“边缘”的协同下,终端设备能够执行精准、灵活的移动与操作。
三层之间通过高速、低延迟的网络紧密耦合,数据与指令双向流动,实现从全局战略到局部战术再到瞬时执行的闭环。
二、 关键赋能:无人驾驶与AGV的效能飞跃
通过云边端协同,“驭势云脑”为无人驾驶和AGV集群带来了革命性提升:
- 群体智能与高效协同:传统AGV或无人车往往“各自为战”,容易在路径交汇点产生拥堵或等待。“云脑”能够基于全局视角,实现车辆间的“对话”与协作,动态规划最优群体路径,如同一个经验丰富的交响乐指挥,让每一台车都成为和谐乐章中的精准音符,大幅提升整体通行与作业效率。
- 动态环境自适应与共享学习:某一台车辆在作业中遇到的新障碍、新路况,其处理经验可以通过边缘节点快速分享给区域内的同伴,甚至经云端提炼后形成新的算法模型,反向赋能所有车辆。这种“一车学习,全局受益”的机制,使得整个系统越用越聪明,能快速适应复杂多变的环境。
- 算力优化与成本控制:将大量非实时、复杂的模型训练和数据分析任务卸载到云端,将高实时性任务交由边缘节点处理,车载终端则专注于即时感知与控制。这种算力分配模式,降低了对单台车辆硬件算力的极致要求,有助于规模化部署的成本控制。
- 安全与可靠性倍增:边缘节点的存在提供了关键冗余。即便与云端连接暂时中断,区域内的车辆依然能在边缘节点的协调下安全、有序运行。多层次的监控和预警机制,也使得安全隐患能够被更早发现、更快响应。
三、 应用前景:从封闭场景到开放道路
“驭势云脑”的落地场景极具想象力:
- 智慧物流与仓储:在大型电商仓库或制造厂内,成千上万的AGV在“云脑”调度下,实现货物的精准、高效、无碰撞流转,仓库吞吐量实现指数级增长。
- 港口与枢纽自动化:在自动化码头,无人驾驶集卡与AGV、龙门吊协同作业,完成集装箱的转运、堆存,全程无人化,作业计划可精确到秒,极大提升港口运营效率。
- 限定区域无人出行:在机场、景区、大学校园等半开放区域,无人接驳巴士、配送车通过“云脑”实现安全、高效的按需服务与交通流管理。
- 未来城市智慧交通:作为更宏大的愿景,当技术足够成熟,“驭势云脑”的理念可扩展至城市公开道路,通过车-路-云协同,实现全域交通流的优化,缓解拥堵,提升安全。
###
“驭势云脑”项目代表着无人驾驶与移动机器人领域从“单体智能”迈向“群体智能”和“系统智能”的关键一步。它通过云、边、端的深度协同,不仅解决了当前无人车与AGV应用中的痛点,更构建了一个可进化、可扩展的智能底座。随着5G、物联网、人工智能技术的持续融合,“驭势云脑”所引领的云边端协同范式,必将成为驱动各行各业智能化转型的核心引擎,真正让无人系统“驭”见势不可挡。
如若转载,请注明出处:http://www.dhnbic.com/product/25.html
更新时间:2026-06-18 21:45:46